Rust Traits: Defining Character
From basic syntax to building plugins with once_cell and organizing your Rust projects.
This is Episode 04
TL;DR
- A huge
matchinmake_sensor()doesn’t scale → let sensors self-register - Use
once_cell::sync::Lazyto build a global registry at runtime - Registry =
HashMap<&'static str, Constructor>wrapped inMutex(orRwLockfor read-heavy use cases) - Each sensor calls
register_sensor(name, constructor)→ adds itself to the registry - Later,
make_sensor(name)looks up the constructor and instantiates the right sensor - Multiple registries can coexist (temperature, pH, etc.) or be unified if needed
- Same approach works for actuators: register themselves, instantiate on demand, expose methods (
get_state,set_state) - Result: a modular, extensible plugin-like architecture for sensors and actuators
Posts
Table of Contents
Once Cell - First-time use
Where the once_cell crate lets us define a global list of sensors dynamically initialized at runtime.
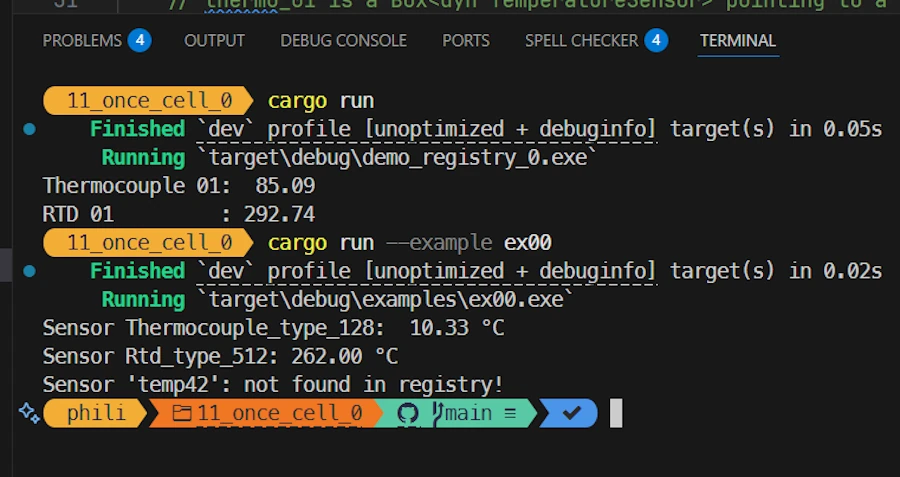
Running the demo code
- Right click on
assets/11_once_cell_0 - Select the option “Open in Integrated Terminal”
cargo add randcargo add once_cellcargo runcargo run --example ex00
Explanations 1/2
Houston, we have a problem. The POC works but I’m not sure it will work with 10_000 thermocouples, different kind of sensors, different kinds of actuators. Do you remember, in the previous version of the application, in temperature_sensor.rs we had a young and innocent make_sensor() function. It looked like this :
pub fn make_sensor(kind: usize) -> Box<dyn TempSensor> {
match kind {
1 => Box::new(my_sensor1::TempSensor01),
2 => Box::new(your_sensor2::TempSensor02),
other => {
// in production return a Result
eprintln!("Unknown SENSOR_KIND='{other}', falling back to temp1.");
Box::new(my_sensor1::TempSensor01)
}
}
}
Pretty young thing, no? No! What will happen with 250 different kind of sensors. We will need a huge match statement. On the other hand, we need to make sure to not overload the application with many sensors while only a dozen is in use… But again, the most critical point is that the match statement above is not scalable and ideally the available sensors should register by themselves.
And this is where the Rust crate once_cell comes to the rescue. In this first version we will keep the file organization as close as possible from the previous one (see the section Dynamic Sensor Creation). One thing however. Instead of temperature_sensor1 and temperature_sensor2 we now use the names thermocouple and rtd which are 2 different kinds of technologies for temperature sensors. Other than that the hub files are still present and the hierarchy is exactly the same. See below :
Show me the code!
.
│ .gitignore
│ Cargo.lock
│ Cargo.toml
│
├───examples
│ ex00.rs
│
├───src
│ │ lib.rs
│ │ main.rs
│ │ sensors.rs
│ │
│ └───sensors
│ │ temperature.rs
│ │
│ └───temperature
│ │ rtd.rs
│ │ temperature_sensor.rs
│ │ thermocouple.rs
│ │
│ ├───rtd
│ │ rtd_512.rs
│ │
│ └───thermocouple
│ thermocouple_128.rs
│
└───target
Explanations 2/2
Let’s start with main.rs
use demo_registry_0::sensors::{self, temperature::temperature_sensor};
fn main() {
sensors::register();
let thermo_01 = temperature_sensor::make_sensor("Thermocouple_type_128").expect("Unknown sensor");
println!("Thermocouple 01: {:6.2}", thermo_01.get_temp());
let rtd_01 = temperature_sensor::make_sensor("Rtd_type_512").expect("Unknown sensor");
println!("RTD 01 : {:6.2}", rtd_01.get_temp());
}
At a high level the code should be easy to understand
- First, the sensors (we don’t really know yet what this covers nor how it works) register themselves
- On return, the sensors are not yet initialized, they just confirm we can instantiate the ones the app need
- Using its name (
Thermocouple_type_128) we create an instance of a temperature sensor and print a temperature measurement - We do the same with
Rtd_type_512
On the other hand, ex00.rs simulates the case where the names of the sensors come from a database and when one reference (temp_42) cannot be instantiated.
fn main() {
sensors::register();
for sensor_name in ["Thermocouple_type_128", "Rtd_type_512", "temp42"] {
match temperature_sensor::make_sensor(sensor_name) {
Some(sensor) => {
let temp = sensor.get_temp();
println!("Sensor {sensor_name}: {:6.2} °C", temp);
}
None => {
println!("Sensor '{sensor_name}': not found in registry!");
}
}
}
}
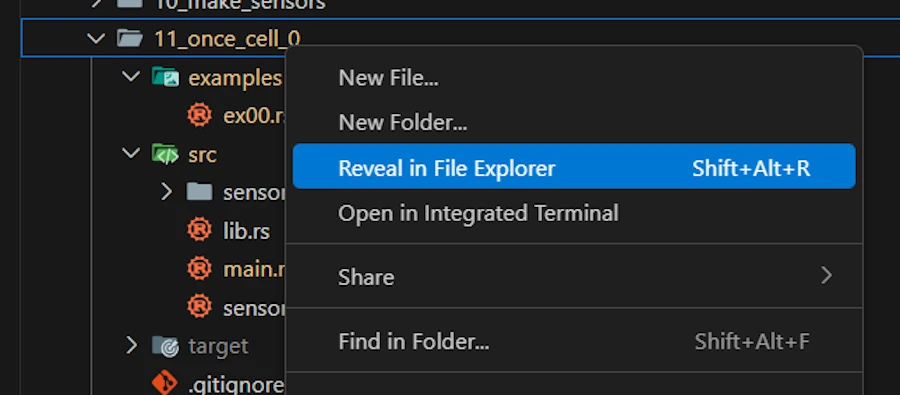
In main.rs, let’s start with sensors::register();. If you use VSCode I recommend to :
- Right click on
assets/11_once_cell_0 - Select the option “Reveal in File Explorer”
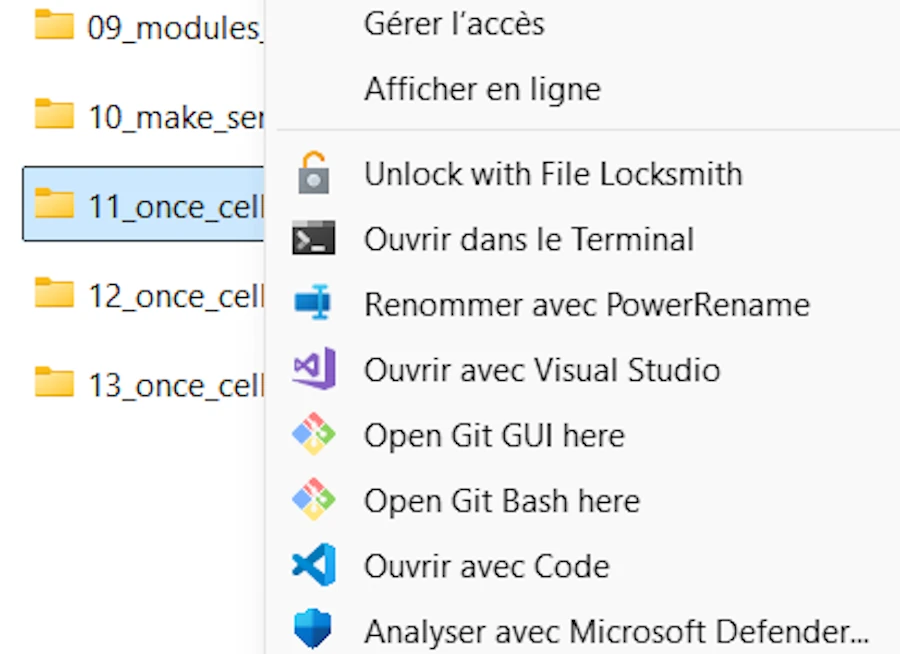
Once in File Explorer
- Right click on
11_once_cell_0 - Select the option “Open with VSCode”
Once in the new instance of VSCode, open main.rs click on the word register of sensors::register. You can either press F12 or right click and select the option “Go to Definition”
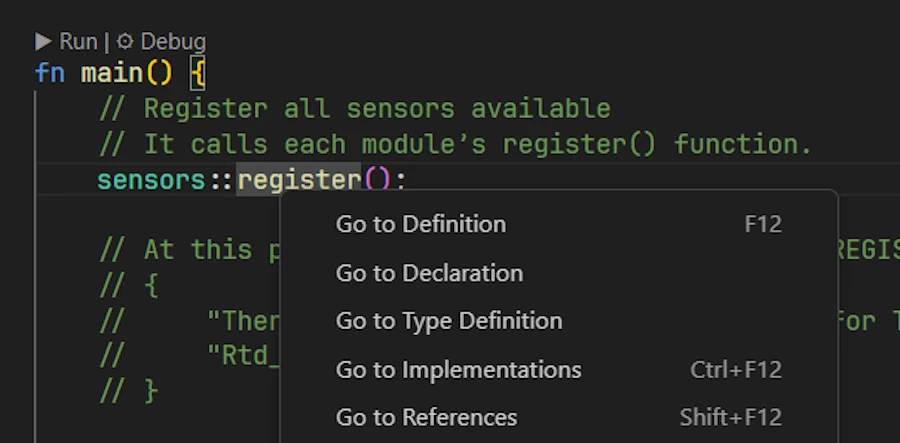
The file sensors.rs opens and we see :
// sensors.rs
pub mod temperature;
pub fn register() {
temperature::register();
}
Let’s step back and make sure we are on the same page. In main() function I know I have some sensors and no actuators. I don’t care about the details, I just call sensors::register() and I do not call actuators::register(). I my mind, calling sensors::register() means I delegate to someone else the registrations of the sensors.
Now at sensors.rs level, I know I only have temperature sensors so I call temperature::register(). This may change later. If we add other kind of sensors (strain gauge, pH meter…) I will then add a call to strain_gauge:register(). This is my responsibility, and strain gauges registration will remain transparent to the main() function.
Ok, let’s press F12 once the cursor is on temperature::register(). This opens temperature.rs.
// temperature.rs
pub mod rtd;
pub mod temperature_sensor;
pub mod thermocouple;
pub fn register() {
thermocouple::register();
rtd::register();
}
At temperature.rs level, I know I only have only 2 types of temperature sensors : thermocouples and rtd. I call thermocouple::register() and rtd::register(). Let’s press F12 once the cursor is on thermocouple::register(). This opens thermocouple.rs.
// thermocouple.rs
pub mod thermocouple_128;
pub fn register() {
thermocouple_128::register();
}
At thermocouple.rs level, I know I only have one kind of thermocouple so I call thermocouple_128::register(). Let’s press F12. This opens thermocouple_128.rs :
// thermocouple_128.rs
use crate::sensors::temperature::temperature_sensor::{self, TemperatureSensor};
pub struct Thermocouple128; // camel case => no _
impl TemperatureSensor for Thermocouple128 {
fn get_temp(&self) -> f64 {
let temp: f64 = rand::random_range(0.0..128.0);
temp
}
}
pub fn register() {
temperature_sensor::register_sensor("Thermocouple_type_128", || Box::new(Thermocouple128));
}
The upper part of the source code is pretty well known. We have a Thermocouple128 data type and we implement the TemperatureSensor trait. Nothing new under the sun and as before the TemperatureSensor trait is defined in temperature_sensor.rs but, if the cursor is on the word TemperatureSensor, do not press F12 yet.
Obviously, the most interesting part is the register() function definition. However, the syntax looks a bit odd, or at least, is not that easy to grasp the first time. Click on temperature_sensor::register_sensor then press F12. This opens the file temperature_sensor.rs. The code below is not complete but it is good enough to understand what is going on :
// temperature_sensor.rs
use once_cell::sync::Lazy;
use std::collections::HashMap;
use std::sync::Mutex;
pub trait TemperatureSensor {
fn get_temp(&self) -> f64;
}
type Constructor = fn() -> Box<dyn TemperatureSensor>;
pub static TEMPERATURE_SENSOR_REGISTRY: Lazy<Mutex<HashMap<&'static str, Constructor>>> = Lazy::new(|| Mutex::new(HashMap::new()));
pub fn register_sensor(name: &'static str, constructor: Constructor) {
let mut map = TEMPERATURE_SENSOR_REGISTRY.lock().expect("registry mutex poisoned");
map.insert(name, constructor);
}
In the upper part part of the file we found the TemperatureSensor trait declaration. No change compared to what we already know. Then, few lines below, there is the definition of register_sensor(), the function we want to study :
pub fn register_sensor(name: &'static str, constructor: Constructor) {
let mut map = TEMPERATURE_SENSOR_REGISTRY.lock().expect("registry mutex poisoned");
map.insert(name, constructor);
}
The register_sensor() function expects 2 parameters. The first one is a name that identify the kind of temperature sensor in the application (thermocouple, rtd… Thermocouple_type_128, Rtd_512…). Note that it is a &str with a static lifetime where static must be understood as “valid as long as the program runs”. This is usually a string literal (e.g. "Thermocouple_type_128"). The second parameter is of type Constructor.
Constructor is a type alias (a synonym) declared above the register_sensor() function :
type Constructor = fn() -> Box<dyn TemperatureSensor>;
Now, when we read Constructor, we should read fn() -> Box<dyn TemperatureSensor>, meaning “a function returning a Box<dyn TemperatureSensor>”. We already talked about Box<dyn T>, you know what this is, I do not have to explain it again:
Finally the really weird thing in register_sensor() definition is the TEMPERATURE_SENSOR_REGISTRY. It is declared this way :
pub static TEMPERATURE_SENSOR_REGISTRY: Lazy<Mutex<HashMap<&'static str, Constructor>>> = Lazy::new(|| Mutex::new(HashMap::new()));
Stay here, don’t run away and don’t panic… The line above just says something like :
TEMPERATURE_SENSOR_REGISTRYis a global static variable (it lives as long as the application)- Its data type is
Lazy<Mutex<HashMap<&'static str, Constructor>>> - It is initialized with the value
once_cell::sync::Lazy::new(|| Mutex::new(HashMap::new()))
- Its data type is
Regarding TEMPERATURE_SENSOR_REGISTRY we see that:
- This is a
HashMapwhere the keys are the literal of the sensors and the values are theConstructor()of the respective sensor - The
HashMapis protected by aMutex. - Important: A static variable cannot be
mut, so we need interior mutability to modify the HashMap at runtime.Mutexprovides that interior mutability and thread safety. - Then the
Mutex<HashMap<...>>is wrapped into aLazylayer.- A
once_cell::sync::Lazy<T>is a wrapper type - It says something like : “Here is a static that will be initialized the first time it’s used.”
- “It uses a closure
(|| Mutex::new(HashMap::new()))to specify how to build the value. - It guarantees that initialization happens once and only once, even if multiple threads race to access it.
- That’s why the crate is named “once_cell”: it’s like a “memory cell” that can be written exactly once.
- A
Regarding the initialization value once_cell::sync::Lazy::new(|| Mutex::new(HashMap::new()))
- A Lazy value says something like : “When somebody first touches this static, run the closure to build the real value.”
- The closure
|| Mutex::new(HashMap::new())creates an empty HashMap wrapped in aMutex. - So the very first time we call
register_sensor()the Lazy runs the closure and it builds theMutex<HashMap<&'static str, Constructor>>
- The closure
Now that we understand what is behind the TEMPERATURE_SENSOR_REGISTRY variable declaration we can understand what the register_sensor() does :
pub fn register_sensor(name: &'static str, constructor: Constructor) {
let mut map = TEMPERATURE_SENSOR_REGISTRY.lock().expect("registry mutex poisoned");
map.insert(name, constructor);
}
- If the
TEMPERATURE_SENSOR_REGISTRYis not yet created, it creates theHashMap(lazy implementation). - Then we call
.lock().expect("registry mutex poisoned"). If a panic ever occurs while the registry is being updated, the mutex becomes poisoned. In that case,.expect()will panic and print a custom message. Remember, aMutexgets poisoned if a thread panics while holding the lock. - To finish we insert the name of the sensor and its constructor in the HashMap.
Could we recover instead of panicking? Yes we can, see below one way but I wanted to keep the POC short :
match TEMPERATURE_SENSOR_REGISTRY.lock() {
Ok(mut map) => {
map.insert(name, constructor);
}
Err(poisoned) => {
let mut map = poisoned.into_inner();
map.insert(name, constructor);
}
}
The idea is that once all the sensors have called temperature_sensor::register_sensor() everyone can use the initialized TEMPERATURE_SENSOR_REGISTRY value and we don’t have to pass the registry around as a parameter in all the functions of the application. Ok?
No. I’m lost! Where are we? What should I keep in mind? Remember… Starting from main(), pressing F12, we followed the register() function calls. Finally we reach thermocouple_128::register() which call temperature_sensor::register_sensor(). On the first call, once_cell::sync::Lazy initializes the registry (a global static variable that holds a HashMap of sensor constructors). Each temperature_sensor::register_sensor() call locks the map and inserts (name, constructor). From then on, any code can look up the name of a temperature sensor and call the stored constructor to obtain a Box<dyn TemperatureSensor>.
Let’s see how a function could look for a sensor name. For that let’s go back to main(). Below is a shortened version with only one sensor created and used. After the line sensors::register(); all sensors are in the global registry with their name and constructor. No constructor have been called. No sensor have been created. Then comes the call temperature_sensor::make_sensor() :
// main.rs
use demo_registry_0::sensors::{self, temperature::temperature_sensor};
fn main() {
sensors::register();
let thermo_01 = temperature_sensor::make_sensor("Thermocouple_type_128").expect("Unknown sensor");
println!("Thermocouple 01: {:6.2}", thermo_01.get_temp());
}
You know what to do. Set the cursor on temperature_sensor::make_sensor() and press F12. Below is the definition of make_sensor :
pub fn make_sensor(name: &str) -> Option<Box<dyn TemperatureSensor>> {
let map = TEMPERATURE_SENSOR_REGISTRY.lock().expect("TEMPERATURE_SENSOR_REGISTRY mutex poisoned");
map.get(name).map(|ctor| ctor())
}
First we get access to the global registry and try to lock it. As before, if the Mutex is poisoned .expect() panics and prints a custom message. Otherwise we find the sensor by its name (the key) and we call the constructor (the value). The returned value of the constructor is the returned value of make_sensor().
What is ctor again ? Previously, we stored in the static global HashMap (TEMPERATURE_SENSOR_REGISTRY) the name of the sensor ("Thermocouple_type_128") as a key and a closure that builds a new instance of this sensor as a value (|| Box::new(Thermocouple128)). Here, with map(|ctor| ctor(), || Box::new(Thermocouple128) is called and its output becomes the returned value of make_sensor(). Look at the signature of make_sensor(). It returns an Option to a boxed data type which implements the TemperatureSensor trait (could be a Thermocouple128, Rtd512…)
OK… Could we recover instead of panicking? Yes we can. See below one idea :
pub fn make_sensor(name: &str) -> Option<Box<dyn TemperatureSensor>> {
match TEMPERATURE_SENSOR_REGISTRY.lock() {
Ok(map) => map.get(name).map(|ctor| ctor()),
Err(poisoned) => {
eprintln!("[warn] TEMPERATURE_SENSOR_REGISTRY mutex poisoned — recovering.");
let map = poisoned.into_inner(); // take the inner HashMap anyway
map.get(name).map(|ctor| ctor())
}
}
}
Let’s move on. At the end of the day from the caller point of view, in main(), we have :
let thermo_01 = temperature_sensor::make_sensor("Thermocouple_type_128").expect("Unknown sensor");
thermo_01 is a ready to use instance of the Thermocouple_type_128 thermocouple. It implements the TemperatureSensor trait so we can call .get_temp() on it :
println!("Thermocouple 01: {:6.2}", thermo_01.get_temp());
Exercise
- Starting from
main(), follow the white rabbit, press F12 and retrieve theregister_sensor()of the rtd. - Do you feel brave enough to add a new category of temperature sensor?
- Add
opticalin addition tortdandtemperatureand the kind of optical sensor could becamera_007.
- Add
- It seems the registry is written once per kind of sensor and read once per sensor. We may end up with much more read than write operations. Any idea on how we could improve performances?
- Solution:
- Rename
temperature_sensor.rsastemperature_sensor.rs.mutex - Rename
temperature_sensor.rs.rwlockastemperature_sensor.rs Cargo runMutexis replaced byRwLock
- Rename
- Solution:
Summary
- We want to avoid the potentially huge
matchstatement of the previous version of themake_sensor()function. - The solution is to let each sensor registers itself into a global registry keyed by a
&'static strand storing a constructor (fn() -> Box<dyn TemperatureSensor>). - Plain globals must be compile-time initialized, so we use
once_cell::sync::Lazyto create the registry at first access safely and exactly once. - The registry is a
HashMap<&'static str, Constructor>providing name → constructor lookups. - Because statics can’t be
mut, we wrap the map in aMutexfor interior mutability and thread safety (considerRwLockwhen reads dominate). - Sensors call
register_sensor(name, constructor)during startup to populate the registry. - At runtime,
make_sensor(name)locks, looks up, and invokes the stored constructor to returnBox<dyn TemperatureSensor>. - Later, sensors can be instantiated on demand by looking them up in the registry.
- Result: scalable, decoupled sensor creation without growing
matchstatements. Smoking!
Once Cell - Different types of sensors
Where we have 2 registries. One for temperature sensors and another for pH sensors.
Running the demo code
- Right click on
assets/12_once_cell_1 - Select the option “Open in Integrated Terminal”
cargo add randcargo add once_cellcargo run
Explanations 1/2
People were so pleased with the previous POC that they ask us a new version :
- with not only temperature sensors but also, other kinds of sensors : they mentioned pH meter, strain gauges, flow meter…
- with multiple references under a kind of sensor. The idea is to show that under
sensor/temperature/thermocouplewe can havetermocoupleX,termocoupleY… - with multiple instances of the same sensor reference because in a plant you can easily have 100 temperature sensors of the same reference.
No worry. This section is short and easy because we already know all we need to know : traits, hub files, once_cell…
If you know nothing about sensors, below I added pH sensors in a dedicated directory. pH sensors help to measure the acidity of a solution. I added 2 kinds of pH meters : probe and ISFET. The idea is to answer point 1 above.
Below, think about the ph directory as a copy/paste/rename of the temperature directory. Nothing more. The hub files, traits and implementation are used exactly the same way.
Note that in the thermocouple directory we now have thermocouple_128 adn thermocouple_256. Two different thermocouple references. This is to answer point 2 above.
See below the file hierarchy of the project.
Show me the code!
.
│ .gitignore
│ Cargo.lock
│ Cargo.toml
│
├───src
│ │ lib.rs
│ │ main.rs
│ │ sensors.rs
│ │
│ └───sensors
│ │ ph.rs
│ │ temperature.rs
│ │
│ ├───ph
│ │ │ isfet.rs
│ │ │ ph_sensor.rs
│ │ │ probe.rs
│ │ │
│ │ ├───isfet
│ │ │ isfet_1024.rs
│ │ │
│ │ └───probe
│ │ probe_2048.rs
│ │
│ └───temperature
│ │ rtd.rs
│ │ temperature_sensor.rs
│ │ thermocouple.rs
│ │
│ ├───rtd
│ │ rtd_512.rs
│ │
│ └───thermocouple
│ thermocouple_128.rs
│ thermocouple_256.rs
│
└───target
Explanations 2/2
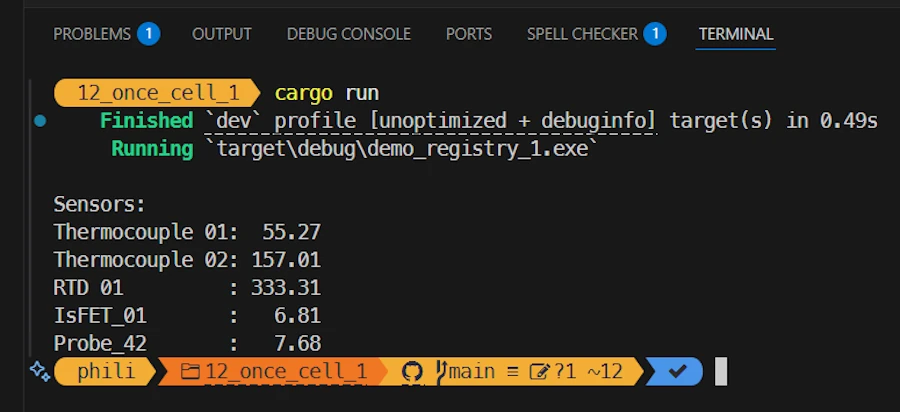
In main.rs we still have the sensors::register(); function call followed by the creation of :
thermo_01andthermo_02to address point 2thermo_02andthermo_03to address point 3isfet_01andprobe_42to address point 1
Here is main.rs :
use demo_registry_1::sensors;
use demo_registry_1::sensors::ph::ph_sensor;
use demo_registry_1::sensors::temperature::temperature_sensor;
fn main() {
sensors::register();
let thermo_01 = temperature_sensor::make_sensor("Thermocouple_type_128").expect("Unknown sensor");
let thermo_02 = temperature_sensor::make_sensor("Thermocouple_type_256").expect("Unknown sensor");
let thermo_03 = temperature_sensor::make_sensor("Thermocouple_type_256").expect("Unknown sensor");
println!("\nSensors:");
println!("Thermocouple 01: {:6.2}", thermo_01.get_temp());
println!("Thermocouple 02: {:6.2}", thermo_02.get_temp());
println!("Thermocouple 03: {:6.2}", thermo_03.get_temp());
let rtd_01 = temperature_sensor::make_sensor("Rtd_type_512").expect("Unknown sensor");
println!("RTD 01 : {:6.2}", rtd_01.get_temp());
let isfet_01 = ph_sensor::make_sensor("IsFET_type_1024").expect("Unknown sensor");
println!("IsFET_01 : {:6.2}", isfet_01.get_ph());
let probe_42 = ph_sensor::make_sensor("Probe_type_2048").expect("Unknown sensor");
println!("Probe_42 : {:6.2}", probe_42.get_ph());
}
You should be able to navigate within the project as we did before.
One thing however. In src/sensors/temperature/temperature_sensor.rs we have :
// temperature_sensor.rs
use once_cell::sync::Lazy;
use std::collections::HashMap;
use std::sync::Mutex;
pub trait TemperatureSensor {
fn get_temp(&self) -> f64;
}
// Type alias for a constructor function returning a boxed sensor
type Constructor = fn() -> Box<dyn TemperatureSensor>;
// Global registry of sensor constructors
pub static TEMPERATURE_SENSOR_REGISTRY: Lazy<Mutex<HashMap<&'static str, Constructor>>> = Lazy::new(|| Mutex::new(HashMap::new()));
// Called by sensors
pub fn register_sensor(name: &'static str, constructor: Constructor) {
let mut map = TEMPERATURE_SENSOR_REGISTRY.lock().expect("TEMPERATURE_SENSOR_REGISTRY mutex poisoned");
map.insert(name, constructor);
}
// Called by binaries (main.rs, examples, tests...) to creates a sensor by name
pub fn make_sensor(name: &str) -> Option<Box<dyn TemperatureSensor>> {
let map = TEMPERATURE_SENSOR_REGISTRY.lock().expect("TEMPERATURE_SENSOR_REGISTRY mutex poisoned");
map.get(name).map(|ctor| ctor())
}
While in src/sensors/ph/ph_sensor.rs we have :
// ph_sensor.rs
use once_cell::sync::Lazy;
use std::collections::HashMap;
use std::sync::Mutex;
pub trait PhSensor {
fn get_ph(&self) -> f64;
}
// Type alias for a constructor function returning a boxed sensor
type Constructor = fn() -> Box<dyn PhSensor>;
// Global registry of sensor constructors
pub static PH_SENSOR_REGISTRY: Lazy<Mutex<HashMap<&'static str, Constructor>>> = Lazy::new(|| Mutex::new(HashMap::new()));
// Called by sensors
pub fn register_sensor(name: &'static str, constructor: Constructor) {
let mut map = PH_SENSOR_REGISTRY.lock().expect("PH_SENSOR_REGISTRY mutex poisoned");
map.insert(name, constructor);
}
// Called by binaries (main.rs, examples, tests...) to creates a sensor by name
pub fn make_sensor(name: &str) -> Option<Box<dyn PhSensor>> {
let map = PH_SENSOR_REGISTRY.lock().expect("PH_SENSOR_REGISTRY mutex poisoned");
map.get(name).map(|ctor| ctor())
}
Both used Mutex and not RwLock but this is not the point. No, the point I want to underline is that one create a static global TEMPERATURE_SENSOR_REGISTRY while the other one create PH_SENSOR_REGISTRY. This means that the application ends up with 2 registries in memory. This might be smart if we have lot of temperature sensors and pH sensors and if we want to shorten look up time. If the look up time is not an issue we could create a unique SENSOR_REGISTRY. Obviously this one should be created in src/sensors.rs (the common ancestor of all the sensors).
Other than that, I think we’re done.
Exercise
- Can you extend the application with weight sensors returning f64 in Newton (mass in kg *9.1)?
- copy paste pH directory
- Rename files and hub files
- Review the trait
- Don’t forget to register
- Instantiate and make measurements in
main()
- This one is hard and it takes time
- Code in
src/sensors/temperature/temperature_sensor.rsandsrc/sensors/ph/ph_sensor.rsidentical. It looks like this :
// temperature_sensor.rs use once_cell::sync::Lazy; use std::collections::HashMap; use std::sync::Mutex; pub trait TemperatureSensor { fn get_temp(&self) -> f64; } // Type alias for a constructor function returning a boxed sensor type Constructor = fn() -> Box<dyn TemperatureSensor>; // Global registry of sensor constructors pub static TEMPERATURE_SENSOR_REGISTRY: Lazy<Mutex<HashMap<&'static str, Constructor>>> = Lazy::new(|| Mutex::new(HashMap::new())); // Called by sensors pub fn register_sensor(name: &'static str, constructor: Constructor) { let mut map = TEMPERATURE_SENSOR_REGISTRY.lock().expect("TEMPERATURE_SENSOR_REGISTRY mutex poisoned"); map.insert(name, constructor); } // Called by binaries (main.rs, examples, tests...) to creates a sensor by name pub fn make_sensor(name: &str) -> Option<Box<dyn TemperatureSensor>> { let map = TEMPERATURE_SENSOR_REGISTRY.lock().expect("TEMPERATURE_SENSOR_REGISTRY mutex poisoned"); map.get(name).map(|ctor| ctor()) }- Copy-paste
assets/12_once_cell_1directory - Reorganize the project so that the code of the registries is monomorphized
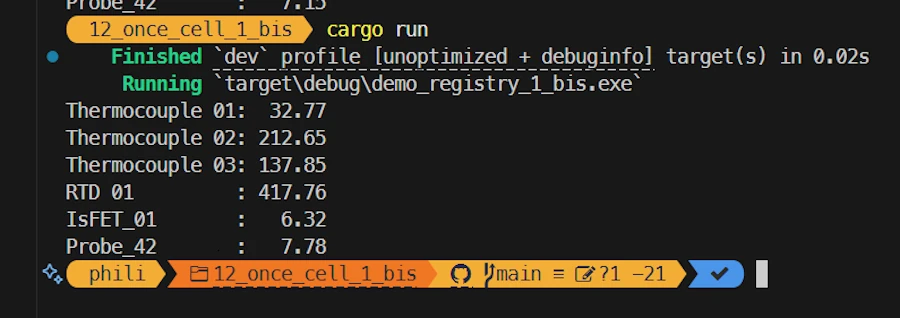
- If you did’nt yet, replace
MutexwithRwLock - One solution :
- Right click on
assets/12_once_cell_1_bis - Select the option “Open in Integrated Terminal”
cargo run
- Right click on
- Code in
Summary
- The previous file organization is reused for adding pH sensors alongside temperature sensors.
- Each sensor family (
temperature,ph) has its own registry implemented withonce_cell::Lazy<Mutex<HashMap<...>>>. main()registers all sensors, then instantiates them by name viamake_sensor().- Having two registries allows faster lookups per family; alternatively, a single unified registry could be used.
Once Cell - Sensors and actuators
Where the application finally uses sensors and actuators.
Running the demo code
- Right click on
assets/13_once_cell_2 - Select the option “Open in Integrated Terminal”
cargo add randcargo add once_cellcargo run
Explanations 1/2
As you can imagine, people now want to see a POC of the complete application where sensors and actuators are used.
This section should be even shorter because, again, we already know all we need to know : traits, hub files, once_cell, REGISTRY…
For demo purpose I created an actuators directory (stuffs that act on the real world to lock doors, heat, cool, turn on alarms). I only created electrical category of actuators but add to kind of electrical motors : servo motor and solenoid.
Again if you don’t know or don’t care about sensors and actuators this is OK. Imagine that the application must handle different kinds of file format, different kinds of communication protocols… They are organized in directories, subdirectories and files.
See below the files hierarchy of the project.
Show me the code!
.
│ .gitignore
│ Cargo.lock
│ Cargo.toml
│
├───src
│ │ actuators.rs
│ │ lib.rs
│ │ main.rs
│ │ sensors.rs
│ │
│ ├───actuators
│ │ │ electric.rs
│ │ │
│ │ └───electric
│ │ │ electric_actuator.rs
│ │ │ servo_motor.rs
│ │ │ solenoid.rs
│ │ │
│ │ ├───servo_motor
│ │ │ servo_motor_01.rs
│ │ │
│ │ └───solenoid
│ │ solenoid_101.rs
│ │
│ └───sensors
│ │ ph.rs
│ │ temperature.rs
│ │
│ ├───ph
│ │ │ isfet.rs
│ │ │ ph_sensor.rs
│ │ │ probe.rs
│ │ │
│ │ ├───isfet
│ │ │ isfet_1024.rs
│ │ │
│ │ └───probe
│ │ probe_2048.rs
│ │
│ └───temperature
│ │ rtd.rs
│ │ temperature_sensor.rs
│ │ thermocouple.rs
│ │
│ ├───rtd
│ │ rtd_512.rs
│ │
│ └───thermocouple
│ thermocouple_128.rs
│ thermocouple_256.rs
│
└───target
Explanations 2/2
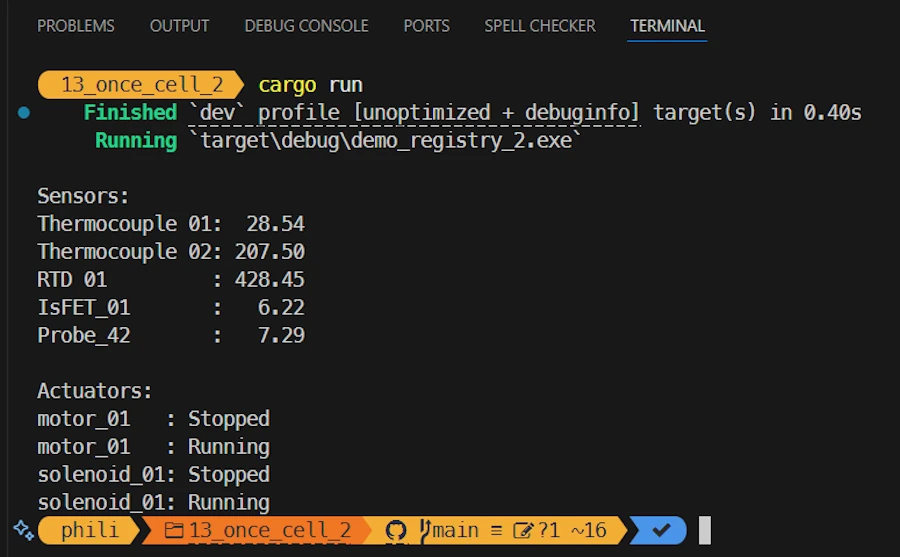
In main.rs we still have the sensors::register(); function call followed by actuators::register();. Then, as before, we instantiate the sensors. Finally we instantiate actuators (motor_01 and solenoid_01) with electric_actuator::make_actuator. We can act on actuators to turn the on and we can also read their status : this is done with the functions .get_state() and .set_state(true). This explain why at the bottom of the terminal we see motor_01 : Stopped when it is created then motor_01 : Running when it is turned on.
Here is main.rs :
use demo_registry_2::actuators;
use demo_registry_2::actuators::electric::electric_actuator;
use demo_registry_2::sensors;
use demo_registry_2::sensors::ph::ph_sensor;
use demo_registry_2::sensors::temperature::temperature_sensor;
fn main() {
sensors::register();
actuators::register();
let thermo_01 = temperature_sensor::make_sensor("Thermocouple_type_128").expect("Unknown sensor");
let thermo_02 = temperature_sensor::make_sensor("Thermocouple_type_256").expect("Unknown sensor");
println!("\nSensors:");
println!("Thermocouple 01: {:6.2}", thermo_01.get_temp());
println!("Thermocouple 02: {:6.2}", thermo_02.get_temp());
let rtd_01 = temperature_sensor::make_sensor("Rtd_type_512").expect("Unknown sensor");
println!("RTD 01 : {:6.2}", rtd_01.get_temp());
let isfet_01 = ph_sensor::make_sensor("IsFET_type_1024").expect("Unknown sensor");
println!("IsFET_01 : {:6.2}", isfet_01.get_ph());
let probe_42 = ph_sensor::make_sensor("Probe_type_2048").expect("Unknown sensor");
println!("Probe_42 : {:6.2}", probe_42.get_ph());
println!("\nActuators:");
let mut motor_01 = electric_actuator::make_actuator("Servo_Motor_type_01").expect("Unknown sensor");
println!("motor_01 : {}", if motor_01.get_state() { "Running" } else { "Stopped" });
motor_01.set_state(true);
println!("motor_01 : {}", if motor_01.get_state() { "Running" } else { "Stopped" });
let mut solenoid_01 = electric_actuator::make_actuator("Solenoid_type_101").expect("Unknown sensor");
println!("solenoid_01: {}", if solenoid_01.get_state() { "Running" } else { "Stopped" });
solenoid_01.set_state(true);
println!("solenoid_01: {}", if solenoid_01.get_state() { "Running" } else { "Stopped" });
}
You are able to navigate into the project. For example here is the content of electric_actuator.rs where we can see that a ELEC_ACTUATOR_REGISTRY global registry is created.
use once_cell::sync::Lazy;
use std::collections::HashMap;
use std::sync::Mutex;
pub trait ElectricActuator {
fn set_state(&mut self, state: bool);
fn get_state(&self) -> bool;
}
type Constructor = fn() -> Box<dyn ElectricActuator>;
pub static ELEC_ACTUATOR_REGISTRY: Lazy<Mutex<HashMap<&'static str, Constructor>>> = Lazy::new(|| Mutex::new(HashMap::new()));
pub fn register_actuator(name: &'static str, constructor: Constructor) {
ELEC_ACTUATOR_REGISTRY.lock().unwrap().insert(name, constructor);
}
pub fn make_actuator(name: &str) -> Option<Box<dyn ElectricActuator>> {
ELEC_ACTUATOR_REGISTRY.lock().unwrap().get(name).map(|ctor| ctor())
}
And here is the content of servo_motor_01.rs. Without surprise, we find a register() function. More interestingly, an actuator needs to store its state. Here in a motor we store a boolean to indicate if the engine is running or not. Below we can see the implementation of the .set_state() and .get_state() methods.
// servo_motor_01.rs
use crate::actuators::electric::electric_actuator::{self, ElectricActuator};
pub struct ServoMotor01 {
state: bool,
}
impl ElectricActuator for ServoMotor01 {
fn set_state(&mut self, new_state: bool) {
self.state = new_state;
}
fn get_state(&self) -> bool {
self.state
}
}
pub fn register() {
electric_actuator::register_actuator("Servo_Motor_type_01", || Box::new(ServoMotor01 { state: false }));
}
Exercise
- In the actuators, add a
Heatercategory and agazkind of heater. Name the referencegaz_3852. Inmain()create an instancemy_gaz_heater, set it on and off. Read it status after each new setting. - Can you easily modify your heater actuator so that the
.set_state()expect af64parameter representing the percentage of heat to be used (from 0.0 to 100.0). Modify.get_state()so that the returned value represents the current percentage of heat.
Summary
- The project now includes actuators in addition to sensors, organized in their own directory structure.
- Actuators implement a trait (
ElectricActuator) with.set_state()and.get_state()methods to control and read their status. - A global actuator registry (
ELEC_ACTUATOR_REGISTRY) is defined withonce_cell::Lazy, similar to the sensor registries. - Each actuator type (e.g., servo motor, solenoid) registers itself with a name and a constructor.
- In
main(), sensors and actuators are both registered and then instantiated dynamically viamake_sensor()/make_actuator().